AirTAC Pneumatic Finger HFP10
——Mechanical Parallel Style
Features
- Two kinds of finger type, standard type and thru.hole mounting type.
- High gripping accuracy. The contact area between finger and body is enlarged to reduce shaking and enhance the gripping accuracy.
- Astructure of lever type gripping is designed to reduce the cost under the premise of accuracy. The finger clamps when the piston rod pushes out and stretches when the piston rod retracts. The gripping force is 20%-30% greater than the tensile force.
- A sheet metal is installed between the finger and body to reduce abrasion and extend the service life.
- With mounting holes on the side and tail. Can be mounted from two directions, Surface installation, Tail installation and Front installation.
- The magnetic switch slots convenient to install inducting switch.
Ordering Code
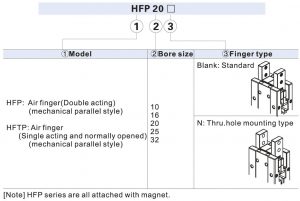
Specifications
| Bore Size (mm) | 10 | 16 | 20 | 25 | 32 | ||
| Acting Type | Double acting, Single acting | ||||||
| Fluid | Air (to be filtered by 40 µm filter element) | ||||||
| Operating pressure | Double acting | Ф10 | 0.2~0.7Mpa (28~100psi)(2.0~7.0bar) | ||||
| Others | 0.15~0.7Mpa (22~100psi)(1.5~7.0bar) | ||||||
| Single acting | Ф10 | 0.35~0.7Mpa (50~100psi)(3.5~7.0bar) | |||||
| Others | 0.25~0.7Mpa (36~100psi)(2.5~7.0bar) | ||||||
| Proof pressure | 1.05Mpa (150psi)(10.5bar) | ||||||
| Temperature ℃ | -20~70 | ||||||
| Lubrication | Cylinder: Not required; Gripper jaws: Lubricate grease | ||||||
| Max. gripping length (mm) | 30 | 40 | 60 | 70 | 90 | ||
| Max. frequency | 180 (c.p.m) | 60 (c.p.m) | |||||
| Sensor switches | CMSG/ DMSG(S) | CMSG/ DMSG(S), CMSH/DMSH(S) | |||||
| Port size | M3x0.5 | M5X0.8 | |||||
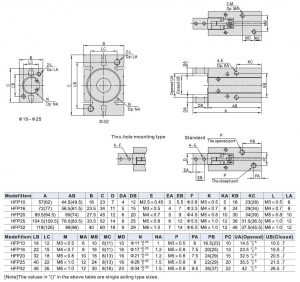
Dimensions